So I have these:
https://hobbyking.com/en_us/zippy-flightmax-5000mah-3s1p-20c.html 2x wired in parallel for 6S
https://hobbyking.com/en_us/turnigy-plush-100a-w-ubec-speed-controller.html
https://hobbyking.com/en_us/turnigy-aerodrive-sk3-5055-280kv-brushless-outrunner-motor.html
And I want to control them with an arduino UNO ( Later on with 433mhz transmitter/receiver https://www.banggood.com/433Mhz-RF-...o-ARM-MCU-Wireless-p-74102.html?rmmds=myorder although might switch to NRF24L01+ 2.4GHz)
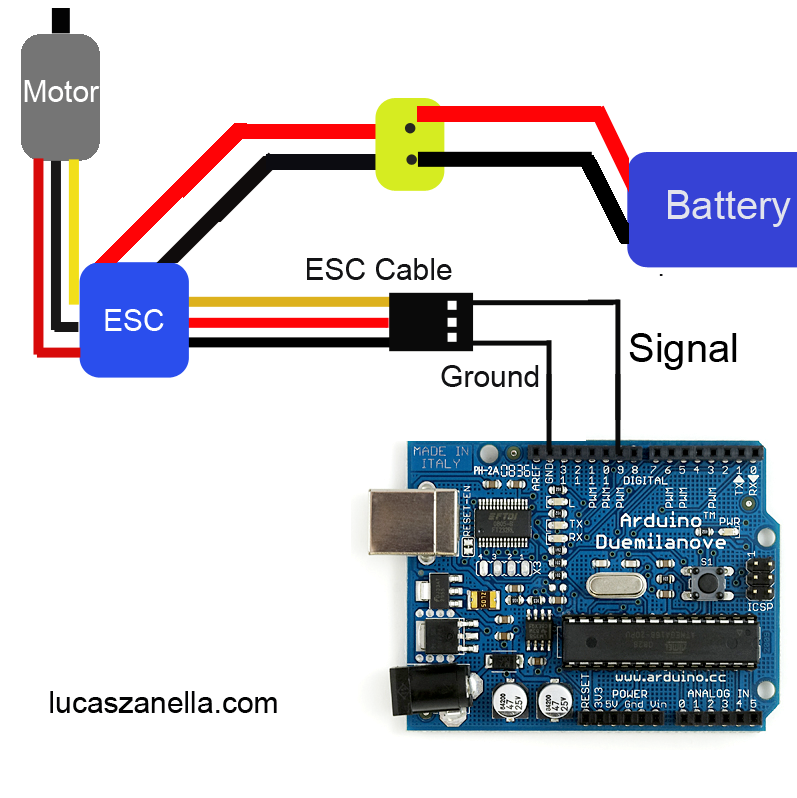
After wiring everything up like in the image and using this code, I press 0 in the serial monitor several times till value gets to 60-70 the motor starts jittering back and forth rather than running constantly in one direction.
What is causing this issue and what can I do about it? (I'm proficient in several programming languages though I havent used the arduino api at all)
https://hobbyking.com/en_us/zippy-flightmax-5000mah-3s1p-20c.html 2x wired in parallel for 6S
https://hobbyking.com/en_us/turnigy-plush-100a-w-ubec-speed-controller.html
https://hobbyking.com/en_us/turnigy-aerodrive-sk3-5055-280kv-brushless-outrunner-motor.html
And I want to control them with an arduino UNO ( Later on with 433mhz transmitter/receiver https://www.banggood.com/433Mhz-RF-...o-ARM-MCU-Wireless-p-74102.html?rmmds=myorder although might switch to NRF24L01+ 2.4GHz)
After wiring everything up like in the image and using this code, I press 0 in the serial monitor several times till value gets to 60-70 the motor starts jittering back and forth rather than running constantly in one direction.
What is causing this issue and what can I do about it? (I'm proficient in several programming languages though I havent used the arduino api at all)
Code:
#include <Servo.h>
Servo myservo;
int value = 60;
int val = 0;
void setup()
{
Serial.begin(9600);
myservo.attach(9);
delay(1);
myservo.write(10);
delay(5000);
}
void loop()
{
while(Serial.available()>0)
{
if (Serial.read() == '0')
{
value +=2;
}
else
{
value-=2;
}
Serial.println(value);
}
myservo.write(value);
}")

