A cheap Arduino application converting text to speech and Braille to be used as a learning device for the blind.
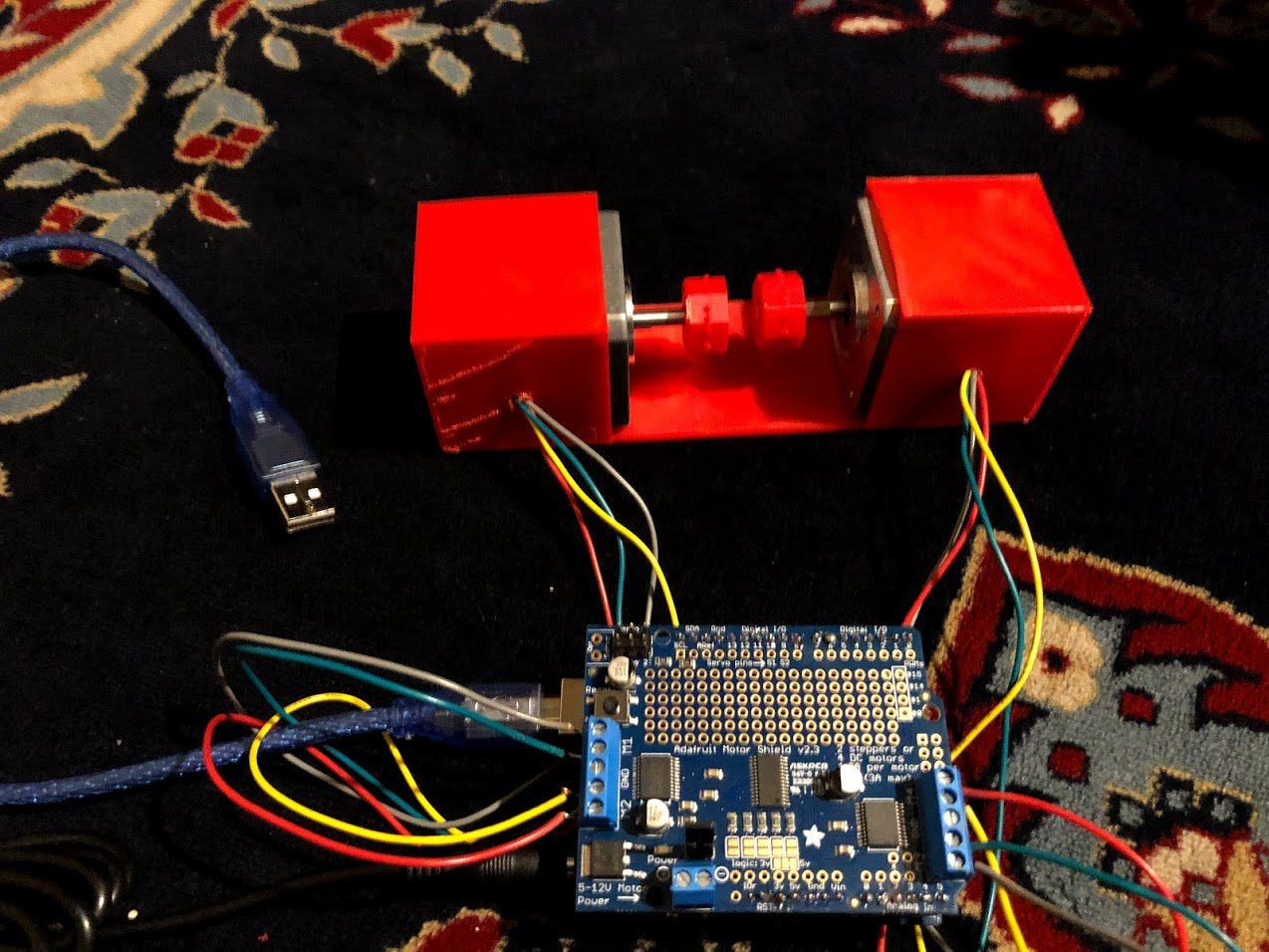
Braille literacy is a key factor in employment of the blind. However, due to lack of teachers and resources braille literacy remains low. I have devised a simple and cheap Braille literacy assistant, with Arduino UNO and two DC stepper motors connected to two octagon Braille wheels which together represent the braille letters and numbers. The wheel was designed in a 3d printer. Text to the Braille system is also simultaneously converted to speech to provide feedback.
/*
This uses the Adafruit motorshield and the Text to Speech sheeld
----> http://www.adafruit.com/products/1438
*/
#define CUSTOM_SETTINGS
#define INCLUDE_TEXT_TO_SPEECH_SHIELD
#include <OneSheeld.h>
#include <Wire.h>
#include <Adafruit_MotorShield.h>
#define numChars 26
static int chars[numChars] = {
0x10,
0x30,
0x11,
0x13,
0x12,
0x31,
0x33,
0x32,
0x21,
0x23,
0x50,
0x70,
0x51,
0x53,
0x52,
0x71,
0x73,
0x72,
0x61,
0x63,
0x54,
0x74,
0x27,
0x55,
0x57,
0x56
};
// Create the motor shield object with the default I2C address
Adafruit_MotorShield AFMS = Adafruit_MotorShield();
// Or, create it with a different I2C address (say for stacking)
// Adafruit_MotorShield AFMS = Adafruit_MotorShield(0x61);
// Connect a stepper motor with 200 steps per revolution (1.8 degree)
// to motor port #2 (M3 and M4)
Adafruit_StepperMotor *myMotorR = AFMS.getStepper(200, 1);
Adafruit_StepperMotor *myMotorL = AFMS.getStepper(200, 2);
int curCharL= 0x1;
int curCharR = 0x0; // start at a/1
int nextCharL, nextCharR;
void setup() {
Serial.begin(9600); // set up Serial library at 9600 bps
Serial.println("Stepper test!");
Serial.println("Starting");
OneSheeld.begin();
AFMS.begin(); // create with the default frequency 1.6KHz
//AFMS.begin(1000); // OR with a different frequency, say 1KHz
myMotorL->setSpeed(10);
myMotorR->setSpeed(10); // 10 rpm
curCharL= 0x1;
curCharR = 0x0; // start at a/1
}
void printChar(char val) {
int dirL, stepsL, dirR, stepsR;
int index;
index = val - 'a';
Serial.println("Printing left/right braille");
//Serial.println(val);
//val = 'a'+i;
Serial.print("Letter ");
Serial.println(val);
nextCharL = (chars[index] & 0xf0) >> 4;
Serial.println(curCharL);
Serial.println(nextCharL);
if((nextCharL - curCharL) >= 0) {
if((nextCharL-curCharL) > (curCharL+8-nextCharL)) {
stepsL = (curCharL+8-nextCharL)*200/8;
dirL = BACKWARD;
} else {
stepsL = (nextCharL-curCharL)*200/8;
dirL = FORWARD;
}
} else {
if((curCharL-nextCharL) > (nextCharL+8-curCharL)) {
stepsL = (nextCharL+8-curCharL)*200/8;
dirL = FORWARD;
} else {
stepsL = (curCharL-nextCharL)*200/8;
dirL = BACKWARD;
}
}
//stepsL = (nextCharL-curCharL) >= 0? (nextCharL-curCharL)*200/8 : (curCharL - nextCharL)*200/8;
//dirL = (nextCharL - curCharL) >= 0? FORWARD : BACKWARD;
//stepsL = (stepsL > 100) ? 200-stepsL : stepsL;
Serial.print("Steps left=");
Serial.println(stepsL);
Serial.print("Dir left=");
Serial.println(dirL);
nextCharR = (chars[index] & 0x0f);
Serial.println(curCharR);
Serial.println(nextCharR);
if((nextCharR - curCharR) >= 0) {
if((nextCharR-curCharR) > (curCharR+8-nextCharR)) {
stepsR = (curCharR+8-nextCharR)*200/8;
dirR = BACKWARD;
} else {
stepsR = (nextCharR-curCharR)*200/8;
dirR = FORWARD;
}
} else {
if((curCharR-nextCharR) > (nextCharR+8-curCharR)) {
stepsR = (nextCharR+8-curCharR)*200/8;
dirR = FORWARD;
} else {
stepsR = (curCharR-nextCharR)*200/8;
dirR = BACKWARD;
}
}
//stepsR = (nextCharR-curCharR) >= 0? (nextCharR-curCharR)*200/8 : (curCharR - nextCharR)*200/8;
//dirR = (nextCharR - curCharR) >= 0? FORWARD : BACKWARD;
Serial.print("Steps right=");
Serial.println(stepsR);
Serial.print("Dir right=");
Serial.println(dirR);
myMotorR->step(stepsR, dirR, SINGLE);
myMotorL->step(stepsL, dirL, SINGLE);
curCharR = nextCharR;
curCharL = nextCharL;
}
void loop() {
char buf[] ="this is a simple string to read for braille";
int numWords = 0;
char *p = strtok (buf, " ");
while (p != NULL) {
TextToSpeech.say(p);
int k=0;
while(p[k] != '\0') {
//TextToSpeech.say(p[k]);
printChar(tolower(p[k]));
k++;
}
p = strtok (NULL, " ");
}
delay(1000);
//exit(0);
}