Introduction:
With low-voltage scanning, dot matrix LED displays have advantages such as power saving, long service life, low cost, high brightness, a wide angle of view, long visual range, water proofness, and so on. They can meet the needs of different applications and thus have a broad development prospect. In this experiment, we will make it display some simple characters like numbers and letters to experience its charm from the beginning.
Components:
- Arduino Uno board * 1
- USB cable * 1
- Dot-matrix (8*8) *1
- Resistor (220Ω) * 8
- 74HC595 * 2
- Breadboard * 1
- Jumper wires
Principle:
Dot Matrix
Generally, there are two types of dot matrix – common cathode and common anode. They look almost the same in appearance. But usually there will be labels for easy recognition. The one with a label ending with AX is a common cathode dot matrix and that with BX is a common anode one. See the figure below for how they look like. So the pins are distributed at the two ends of the matrix. Pins at one end (usually the label side) are 1-8 from left to right, when at the opposite they are 9-16 from right to left.
Below is the internal structure. You can see that in the common anode dot matrix, ROW is the anode of LED and COL is the cathode, while the situation in the common cathode one is opposite. Though for both types, the columns are the pin 13, 3, 4, 10, 6, 11, 15, and 16 and rows are the pin 9, 14, 8, 12, 1, 7, 2, and 5 in the dot matrix. To light up the first LED on the upper left corner, you need to set pin 9 as high level and pin 13 as low level in the common anode dot matrix; for a common cathode one, set pin 13 as high and pin 9 as low. If you want to turn on all the LEDs at the first row, in a common cathode dot matrix, set pin 13 as low level and ROW 9, 14, 8, 12, 1, 7, 2, and 5 as high level. In a common anode one, set pin 13 as high level and those rows as low level. See the figure below for better understanding.
Procedures:
In this experiment, two 74HC595 chips are used – one to control the rows and the other, the columns. They are connected by cascading. The SHcp and STcp are shared between them. Connect pin DS of the U3 (see as above) to pin 11 of the Uno, and Q7' of the U3 to DS of the U2 so the two chips are cascaded. Then when a 16-bit data is sent, the first 8 bits are transferred to the U3 and the rest 8 bits to the U2, thus controlling rows and columns of the dot matrix.
Step 1:
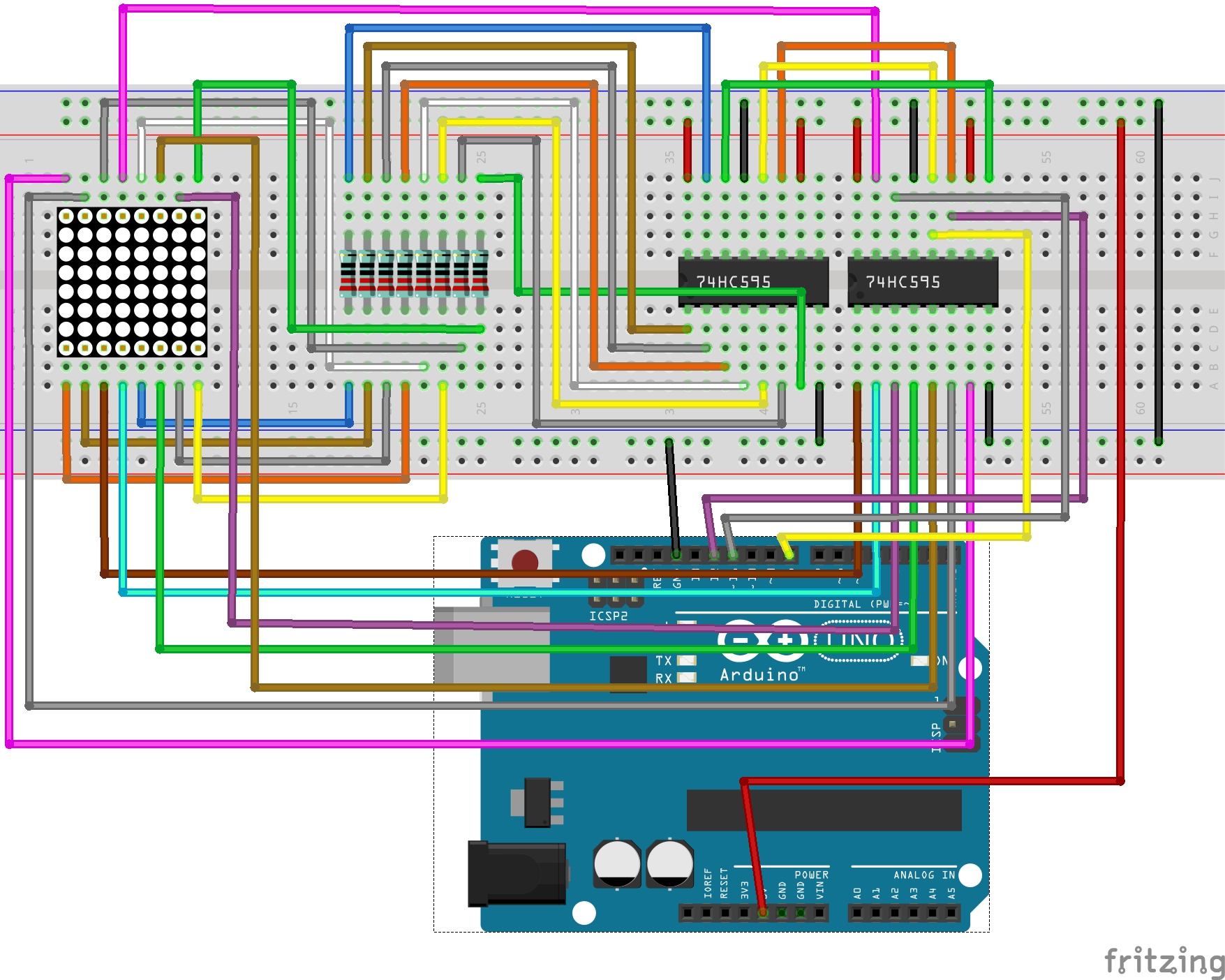
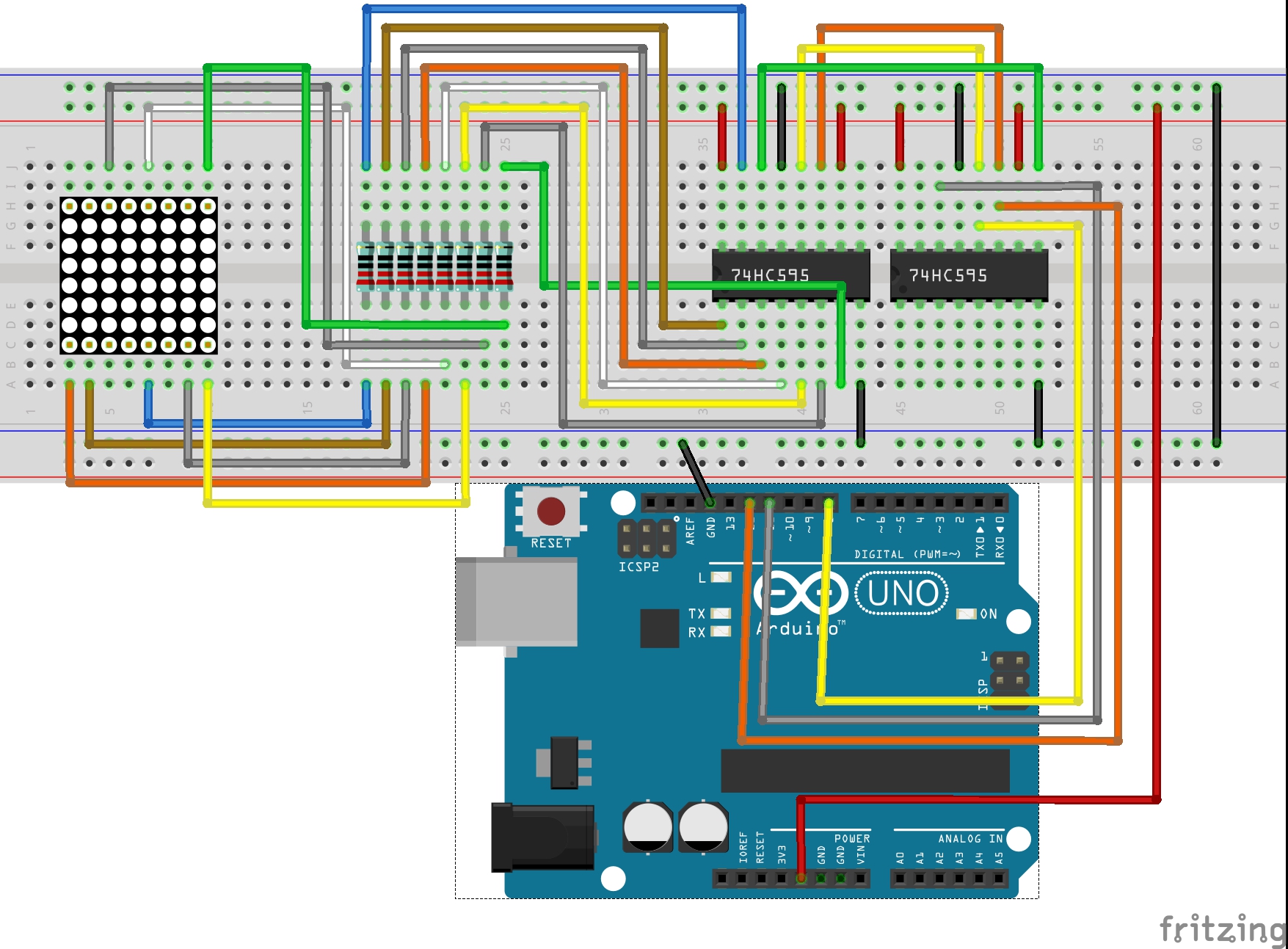
Build the circuit.
Since the wiring of this experiment is a little complicated, we will do it step by step.
1) Insert all the devices needed into the breadboard. Then connect pin 16 and pin 10 of the 74HC595 to 5V of the control board, pin 8 and pin 13 to the GND. The 788BS on the image means you should put the matrix with the side marked with "788BS" facing that direction.
2) Connect pin 11 of the two 74HC595 chips together and connect them to pin 12 of the control board. Connect pin 12 of the two 74HC595 and then to pin 8. Pin 14 of the 74HC595 on the left connects to pin 9 on the right. Connect pin 14 of the 74HC595 on the right to the pin 11 of the control board.
3) The 74HC595 on the left controls the ROW of the dot matrix. To prevent burning the matrix, we need to connect a 220 ohm current limiting resistor to each row. Connect Q0-Q7 of the 74HC595 to pin 5, 2, 7, 1, 12, 8, 14, and 9 of the dot matrix.
4) The 74HC595 on the right controls the columns of the matrix. Connect Q0-Q7 of the 74HC595 to pin 13, 3, 4, 10, 6, 11, 15, and 16 of the matrix respectively.
Step 2:
Download the code from https://github.com/primerobotics/Arduino
Step 3:
Upload the sketch to the Arduino Uno board
Click the Upload icon to upload the code to the control board.
If "Done uploading" appears at the bottom of the window, it means the sketch has been successfully uploaded.
You should now see the 7-segment display from 0 to 9 and A to F.
//Dot-Matrix Display
//The dot-matrix will display 0 to F circularly
//Email: [email protected]
//Website:www.primerobotics.in
const int latchPin = 8;//Pin connected to ST_CP of 74HC595
const int clockPin = 12;//Pin connected to SH_CP of 74HC595
const int dataPin = 11; //Pin connected to DS of 74HC595
int data[] = {
0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,/*" ",0*/
0xFF,0xC1,0xBE,0xBE,0xBE,0xC1,0xFF,0xFF,/*"0",1*/
0xFF,0xDF,0xDF,0x80,0xFF,0xFF,0xFF,0xFF,/*"1",2*/
0xFF,0xDC,0xBC,0xBA,0xB6,0xCE,0xFF,0xFF,/*"2",3*/
0xFF,0xDD,0xBE,0xB6,0xB6,0xC9,0xFF,0xFF,/*"3",4*/
0xFB,0xF3,0xEB,0xDB,0x80,0xFB,0xFF,0xFF,/*"4",5*/
0xFF,0x8D,0xAE,0xAE,0xAE,0xB1,0xFF,0xFF,/*"5",6*/
0xFF,0xC1,0x96,0xB6,0xB6,0xD9,0xFF,0xFF,/*"6",7*/
0xFF,0xBF,0xBC,0xB3,0xAF,0x9F,0xFF,0xFF,/*"7",8*/
0xFF,0xC9,0xB6,0xB6,0xB6,0xC9,0xFF,0xFF,/*"8",9*/
0xFF,0xCD,0xB6,0xB6,0xB4,0xC1,0xFF,0xFF,/*"9",10*/
0xFC,0xF3,0xCB,0x9B,0xEB,0xF3,0xFC,0xFF,/*"A",11*/
0xFF,0x80,0xB6,0xB6,0xB6,0xB6,0xC9,0xFF,/*"B",12*/
0xFF,0xE3,0xDD,0xBE,0xBE,0xBE,0xBE,0xDD,/*"C",13*/
0xFF,0x80,0xBE,0xBE,0xBE,0xBE,0xDD,0xE3,/*"D",14*/
0xFF,0x80,0xB6,0xB6,0xB6,0xB6,0xBE,0xFF,/*"E",15*/
0xFF,0x80,0xB7,0xB7,0xB7,0xB7,0xBF,0xFF,/*"F",16*/
0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,/*" ",17*/
};
void setup ()
{
//set pins to output
pinMode(latchPin,OUTPUT);
pinMode(clockPin,OUTPUT);
pinMode(dataPin,OUTPUT);
}
void loop()
{
for(int n = 0; n < 136; n++)
{
for(int t = 0;t < 10;t ++)//Show repeated 10 times
{
int dat = 0x01;
for(int num = n; num < 8+n; num++)
{
shiftOut(dataPin,clockPin,MSBFIRST,~data[num]);//control ROW of dot matrix
shiftOut(dataPin,clockPin,MSBFIRST,~dat); //control COL of dot matrix
//return the latch pin high to signal chip that it
//no longer needs to listen for information
digitalWrite(latchPin,HIGH); //pull the latchPin to save the data
//delay(1); //wait for a microsecond
digitalWrite(latchPin,LOW); //ground latchPin and hold low for as long as you are transmitting
dat = dat<<1;
delay(1); //wait for a microsecond
}
}
}
}
// Your code here