Learn the ins and outs of stepper motors and the pros and cons of choosing this type of motor for your project.
If you're working on a project that has a moving part, you'll probably be looking for a motor to make that movement possible. In this series, we explore the most popular types of motors that makers utilize. So far, we've covered three popular motors for makers:
To read up on what types of projects that stepper motors work best in, check out the round-up:
What Type of Motor is Best for My Project?
Stepper Motor Overview
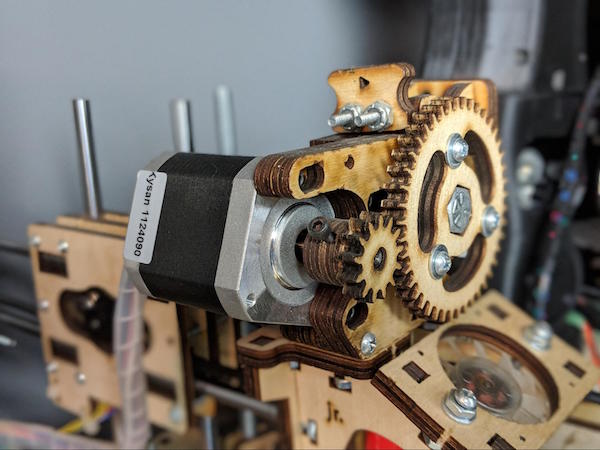
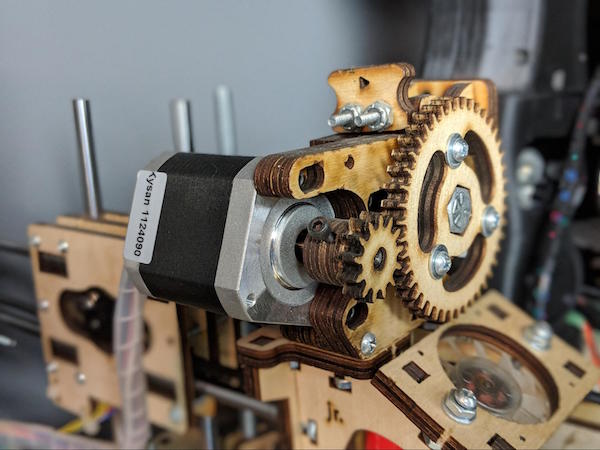
In the maker world, stepper motors are ubiquitous in 3D printing technology. All consumer 3D printers are powered by stepper motors. Stepper motors are also used extensively in robotics.
Stepper motors are used extensively in robotics and 3D printers.
Stepper motors are often compared to servo motors because both types of motor are used in systems requiring a high level of positioning accuracy.
However, the way each type of motor tracks its position is very different. As discussed in the previous section, a servo motor contains a potentiometer that measures the motor’s absolute position. So at any given time, a servo knows exactly how the motor shaft is positioned. A stepper motor does not measure the angle of its motor shaft.
How do Stepper Motors Work?
The construction of a stepper motor is like a more sophisticated version of the brushed DC motor. You will notice that many of the parts are essentially the same, but in a stepper motor, their design is significantly more complex.
The main parts of a stepper motor.
On a stepper motor, the windings are arranged around the outside of the casing. Permanent magnets are mounted onto the motor shaft. Because these permanent magnets are quite heavy, a ball bearing on either side of the motor shaft helps to stabilize the motor.
Stepper motors work on a theory similar to brushed DC motors. The windings are energized to create a magnetic field, causing the motor shaft to move by exerting a force on the permanent magnets.
The ridges on the permanent magnets match similar ridges found on the coils on the motor casing. Rather than continuously rotating, steppers move in discrete steps between these ridges.
The difference with stepper motors is that rather than rotating about 30% of the way around each time the windings switch polarity, a stepper motor moves only a little bit, typically only 1.8 degrees. Each of these tiny rotations is called a step. Controllers are even able to manipulate the power delivered to the windings in such a way that a stepper motor can move as little as 0.05625 degrees per step. This kind of extremely granular motion control allows for steppers to achieve very high positional accuracy.
Stepper Motor Pros
High Positional Accuracy
The major reason steppers motor exist is to enable motion systems with highly accurate positional tracking.
High Torque at Low Speeds
Stepper motors deliver significant torque at low speeds.
Stepper Motor Cons
Low Maximum Speed
Because stepper motors move in distinct steps, they have a low maximum speed.
Low Torque at High Speed
At higher speeds, stepper motors lose significant torque, delivering only about 20% of their torque at lower speeds.