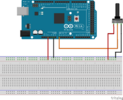
I'm using an Ardunio Mega board and a pot to control a 180 servo. The problem I am experiencing is that the pin read on the pot jumps around from 0 to 600 or so and I don't get a smooth 0 to 1024 range. I don't know if this is because the pot I am using is a cheap hobby pot and I need to higher quality pot or if it's something in my Ardunio code, or maybe my wiring is at fault?
Any comments appreciated. Thank you.
Any comments appreciated. Thank you.
")